
菅生大会報告
公式結果
菅生大会への準備から決勝までの私たちの軌跡を紹介したいと思います。
また、菅生大会の公式結果はこちらから御覧になれます。
- http://www2.ogata.or.jp/wem/wemgp/04wemgp/04wemgp3.htm
- http://www.zdp.co.jp/index.html
- http://www.zdp.co.jp/2004/20040830.html
菅生を走るための作戦

fig1 : DDモータ
当初の予定では、1kwを超える定格出力のDDモータ(Direct Drive Motor)(fig1)を用いてレースに望むことになっていました。このようなモータが必要になった理由は二つあります。一つ目はスペースとの兼ね合いです。もともと筑波大会(去年までありました)向けに設計した車体なので、使うモータは0.1kw程度で小さいため、モータの為にスペースを空けるということはほとんどしなかったのです。なので、ホイールにそのまま取り付けられて、減速機構なども一切必要の無いDDモータが理想的でした。二つ目は、10%の上り坂(100m進むと10m登るという意味です。歩いて登るのも嫌な程の坂です。)を高速で登り、下り坂で高い回生効率を得るためです。定格出力が小さくては、単位時間に登坂できる高さが低くなりますし、回生できる速度も落ちるからです。

fig2 : 3つのモータ
しかし、私たちは、このようなモータを使うことが出来なくなりました。これはひとえに計画性の無さが招いた惨事でした。大会一ヶ月前でした。モータがなくては走れないので、必死のモータ探しをしました。ソーラーカーの鈴鹿大会でも、MeisterOBの応援をしつつ、他チームにDDモータを貸してもらえないか交渉したりもしました。しかし、結局DDモータのつてはありませんでした。昨年の大会では、特電筑波モータ(私たちが普段の大会で使用するモータ)を3つ駆動させて好成績を挙げた例(fig2)があったのでその作戦も検討されましたが、1つ5万円のモータはそう簡単に買えるものではありませんでした。最終的には、学内の原子炉研の島田教授に450wのDCブラシモータ(fig3)を貸していただけることになりました。DCブラシモータとは、マブチモータのような基本的なモータです。けっして効率のいいモータではなく、出力も足りませんでしたが、これを使って勝負することに決めました。
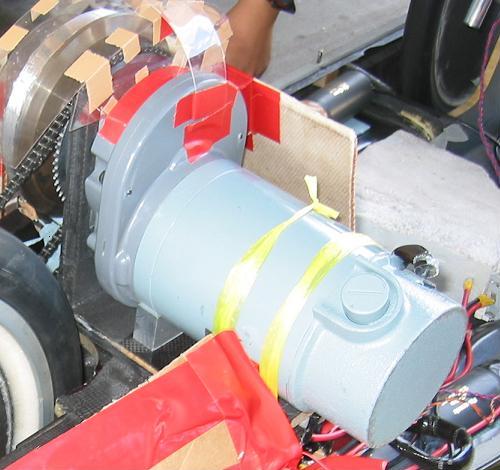


fig3 : モータ fig4 : 坂 fig5: 変速機構
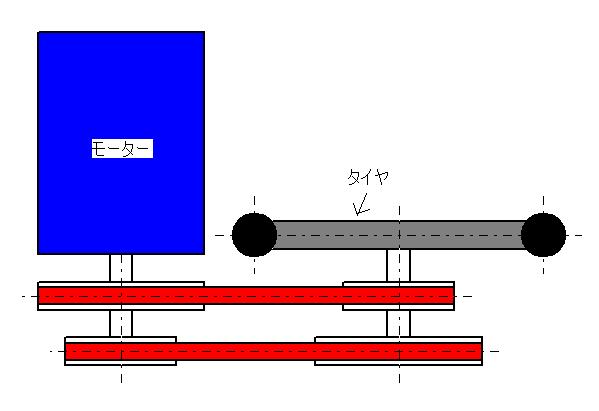
fig6 : 変速方式
菅生では、坂(fig4)を上れるかどうかが決め手となりますので、減速比を定める場合は坂を上れるようにする必要があります。しかし、私たちの使えるモータでは、1段変速では下り坂や平地でもたいした速度が出なくなります。そこで2段変速のトランスミッション(fig5)を積んで、その問題を解消することにしました。扱いやすさの点から、減速機構はチェーンによるものにし、変速は自転車のようにスプロケットにかかるチェーンを乗せかえるのではなく、電磁クラッチを用いて2本のチェーンラインを切り替えるというものです(fig6)(赤い帯がチェーンを表しています。モータ側のチェーンラインが高速側、外側のチェーンラインが低速側になります。自転車の減速機構をイメージしてもらえば分かりやすいと思います。絵にはありませんが、駆動・被駆動側のそれぞれの小さいスプロケットにクラッチが付いています。)。
このトランスミッションを使うことで、きつい勾配では低速ギアで走行し、さほどきつくない勾配では高速ギアで走行、長い下り坂ではニュートラル状態(駆動輪とモータを切り離した状態)で転がり、制限速度の80km/hにまで加速してタイムを縮めようとしました。つまり、上位チームの(かつての私たちの作戦の)定速走行作戦に対して、坂道でのタイムロスをそれ以外で縮めるというのが私たちの勝負の鍵でした。
製作から出発

fig7 : アッパーカウル積層
運良くモータを貸していただけることにはなりましたが、モータは裸(コントローラが付いていない)で、重さは12kg、しかもカウルからはみ出すほどの大きさというとても扱いにくいものでした。lucciolaのアッパーアンダー両カウルはプリプレグによって高い品質のものを製作することが出来たので、カウルに傷をつけたくはありませんでした。そのために、Meisterに余っている6kのクロスを用いて新しく菅生用にアッパーカウルを積層しなおしました(fig7)。去年のSleipnirと違って、Lucciolaは残りのグランプリの3つの大会(豊田・白浜・幸田)を残しているので、菅生のための大幅な改造はしたくありませんでした。このために、モータを取り付ける方法は更に限られるものとなり、トランスミッションの配置も苦しいものとなりました。更には制作期間の短さです。8月の半ばといえばお盆です。そのために制作活動もしにくい状況にありました。作業は次々に先延ばしにされ、大会前の一週間は秋田を髣髴させる忙しさでした。電気関係の製作の一切を行うチームエレキの姿が倉庫から消える日はありませんでした(fig8)。更には、まだ部門所属していない1年生も、車体の重要な部品の製作を助けてくれました(fig9)。



fig8 : チームエレキ fig9 : 一年生たち fig10 : 良い子はまねしないでください
大会前々日、機械パーツが大体そろい、いざ組み立て!というところで、まさかの寸法違いなどの問題が発生。徹夜のでっち上げ作業で何とか形になっていきました(fig10)(図は、円筒部品が多少大きかったために、これを電動ドリルを用いて回転させ、紙やすりで削っているところの一部です。良い子はまねしないでください。)。電気部品は未だ完成はしておらず、現地入りしてからの徹夜作業が予想されていました。
大会前日、お盆を終えて戻ってきた1年生を加え、普段のMeisterでは考えられない作業密度で製作が進み、出発のお見送りに来てくれた仲間を待たせながら予定より5時間遅れでの作業終了。積み込みを終えて予定より6時間遅い午前4時の出発でした。
公式練習
菅生大会では、2回ある公式練習の結果(ラップタイム)で決勝のグリット順が決まります。さらには、菅生のようなコースは普段は走ることが出来ないので、決勝で 作戦通りのレースを展開するためにも、公式練習でコースを走れることは多くのチームにとって重要でした。パドックに入った私たちは早速続きの作業を開始(fig11)。モータを組み付け、車検に向けてlucciolaを菅生バージョンへと組み替えてゆきます。しかし、思うように作業はすすまず、ついには車検に車を持っていくことすら出来ませんでした。公式練習が終わっても作業は終わってはおらず、長引きそうな電気作業を宿に移し、車体製作はパドックに残って22時まで続きました。翌日の公式練習に向けて体を休めるべく、車体製作組は宿に向かいました。宿では電気作業が去年と同様の部屋でおこなわれており、公式練習に間に合うための必死の作業が続いていました。テスト期間中からの度重なる徹夜作業で疲れ果てていながらも黙黙と作業は続いていました。
夜が明けて、ついに決勝の日の朝を迎えました。電気作業は続いていましたが、きりのいいところでパドックへと移りました。急ピッチで追い上げを見せるも、またも公式練習に間に合わず、本当のぶっつけ本番を迎えることとなりました。この頃になると応援組みの人たちも続々とパドックへ顔をみせに来てくれ始めました(fig12)。


fig11 : 作業の続き fig12 : 応援組み
決勝

fig13 : 回路は未完
完成した電気部品を次々と車体に組み付けいていく中、今回の大会で重要な部品であるクラッチの切り替え回路がまだ完成していませんでした(fig13)。グリッドイン直前になっても未だ車検すら完了していないという未だかつてない完成の遅れでした。結局省エネを狙った回路は諦め、単純な機構へと変更をし、ようやく駆動試験を迎えました。決勝は既に始まっていました。ピットスタートを間逃れられなかった私たちは、決勝が始まる時刻になってもまだピットで作業をしていたのです。そんな状況での試験、「うまく動いてくれ!」そう想いながらボリュームをひねりました。しかし・・・「ガチャガチャガチャ!!!」けたたましい音と振動を発生させ、すぐにブレーカーを落としました。原因はクラッチの焼付け。ごみがクラッチ面に入り込んだために、両方のクラッチ同士がそれぞれ噛み付いてしまったのです。そのためにチェーンが歯飛びを起こしたのでした。狭いスペースの中に入るように設計された駆動系の再組み立ては容易なものではありませんでした。既にレースが始まって30十分、私たちは2段変速を諦めました。高速ギヤを捨て、低速ギアで坂を上り、ニュートラルで下り坂を駆け下りることにしました。急ピッチで走れる状態にして、ピットにて車検を受け、ようやくのスタート!残り時間は既にあと30分となっていました。しかし、走り出したlucciolaはバチバチと歯飛びの音を発しながらピットロードを進んでゆき、コースに入った直後に止まってしまいました。そこはゆるい勾配、10%を登れるようにした車がこんなところで止まってしまいました。原因はチェーンの脱落。モータマウントの剛性不足が招いた結果でした。剛性不足により車軸とモータ軸の距離が変動してしまい、チェーンが外れたのです。残り30分弱。私は応急処置のテンショナーを思いつき、ピットへ走りました。あまりしたくはありませんでしたが、ピットにてアルミ板に穴を開け、けたたましい音をたててその板の必要な部分を切り取り、残りの部品をもってlucciolaの元にもどりました。そのときの気持ちは、レースで勝つというものではなく、応援に来てくれたみんなに、自分たちの作った車が菅生を走る姿を見てもらいたいというものでした。この大会お為に、実に多くの方々の協力を得ていました。何が何でも走らせてやる、そんな思いでした。構造は簡単でしたが、思ったとおり、歯飛びはなくなりようやく走れる状態になり、決勝残り数分での再スタート!「走れ!」そう心で叫びながらドライバーにスタートの指示を出すも、非力にもがくだけでした。結局、勾配を登ることが出来ず、レース終了。原因は未だ謎です。
大会では安全のため、走行できなくなった車体は搬送車にてピットまで運ばれます。私たちはその車に乗り、lucciolaとともに今年は走れなかった菅生サーキットを一周しました。なんともいえない複雑な思いでした。
ピットに帰ってくると、チームや応援のみんなが迎えてくれました。ここにきてやっと「レースが終わったんだな」と実感しました。
結果
成績ですが、走行距離は、分かりません。公式記録としてでていないためです。
自分の目測によれば、10mくらいでしょうか。実際に菅生の装備で走行した距離は200mほどです。
反省
大会というものに出る以上、勝つことが重要です。私たちも、レースで勝つことを目指して活動してきました。この菅生大会も、苦しくはありましたが、残された手段でベストを尽くそうとしました。しかし、それはレースが出来てからの話だったと気が付きました。自分たちの能力(技術・時間・資金を含めた)を超える作戦は、たとえどんなにすばらしいものであっても意味がない、そう気づきました。菅生まではるばる応援に来てくれた人のことを考えると、そう思わずにはいられませんでした。しかし、そうは言いながらも、無難な走りに甘んじなかったこの挑戦は個人的には悪いものではなかったと思っています。私たちは2段変速という難題にチャレンジしていたからです。
今回完成できなかったこの変速システムは、おいおい完成させたいと考えています。
