2017年4月の記事です。
≪2017年1月 2017年5月≫
書いた人: Y.U | 17/04/02 10:29
こんにちは。怠けていた分は更新回数でごまかしていくスタイルのロガー担当です。続いては電装系の進捗報告をしていきます!気速計です。ロータリーエンコーダの先端にプロペラを取り付け、回転速度に応じて対気速度を算出しています。今後は表面実装で小型化に挑戦していきます。回転計です。ドライブシャフトにスリットを取り付け回転数の検出を行っています。昨年度のものより若干小型になりました(基板サイズ43.3×16.9 mm)。高度計です。超音波センサを用いて高度を取得しています。表面実装版を製作したところ、ロガーとの通信がうまくいかず苦戦しているようです。出力計です。昨年までも行っていたクランクのひずみを基にしたトルクの取得に加え、今年は新たな試みとして9軸センサを用いた角速度の取得にも挑戦しています!さらに両面基板で作成することで、サイズは去年度のものの1/2以下となりました(37.8×22.2 mm)。操舵の制御基板です。操縦桿の入力に応じて、尾翼のサーボモータの切れ角を変化させています。舵角表示機との通信を無線化することで、若干ですが小型化しています。操縦桿です。ご賢察の通り、去年のものを使いまわしていました。しかし、前回のGSUにてハンドルに収まらないトラブルが発生したので作り直すことになりそうです。サーボ用電源です。軽量化のため、リチウムイオンポリマー電池への移行を検討しています。7セグ表示機です。気速、回転数、高度を表示します。昨年度のものよりひと回り小型化してます(基板サイズ68.2×64.6 mm)。舵角表示機です。サーボの切れ角とトリムの段階を表示します。これも昨年度のものより小型になっています。この流れでAndroid表示機も紹介したいところですが、残念ながらまだ完成していません...というかこれから作り始めるってレベルです...。最後はロガーの紹介です。基板はまだ去年のものを使いまわしています。microSDへの書き込みの他に、GPSによる位置情報、9軸センサによる姿勢角、そして気圧の取得も行っています。Android表示機が完成し次第、基板の設計に入る予定です。鳥コン本番まで残り4ヶ月弱しかありませんが、すべての製作物を完成させられるよう引き続き班員一同頑張っていきます。P.S. 先日行われたGSUのログに関しては、電操班の公式Twitter(@Meister_ctrl)にて公開いたします。ぜひご覧ください。
コメントを書く
書いた人: Y.U | 17/04/01 19:28
2ヶ月間更新サボってしまいすいませんでした!!!ロガー担当のY.Uです。先週私たちのもとにも通知書が届き、「第40回鳥人間コンテスト2017」へ出場できることになりました!この半年間の、代表をはじめとする部員一同の努力の賜物だと思います。同時に、執行代として機体を琵琶湖で飛ばせることを心から嬉しく感じております。さて、ここからは操舵系の進捗の報告です。2月の下旬に、機構の大部分が完成した状態で尾翼の取り付け試験を行いました。例年製作精度が出ずに悩まされていた機構製作ですが、今年は見事直角を出すことに成功しました!秋にモックアップを作ったときの反省点をうまく生かすことができ良かったです。先日行われたグラウンドでの機体組み上げの時に撮影したものも載せておきます。今後はパイロットと協議を重ね、操作性を良くするなど改良に努めていきます。


こんにちは。怠けていた分は更新回数でごまかしていくスタイルのロガー担当です。
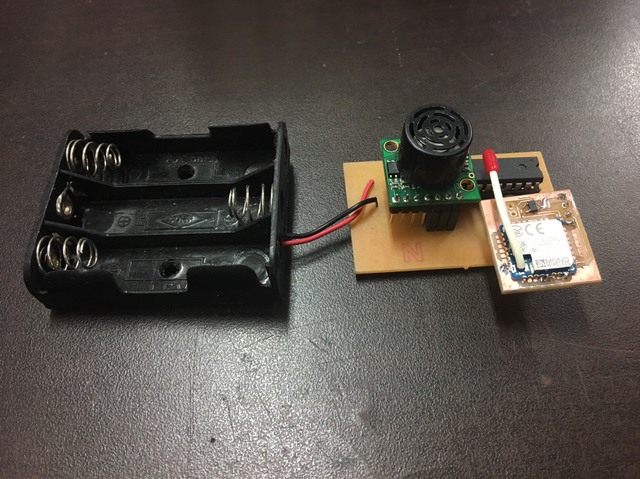
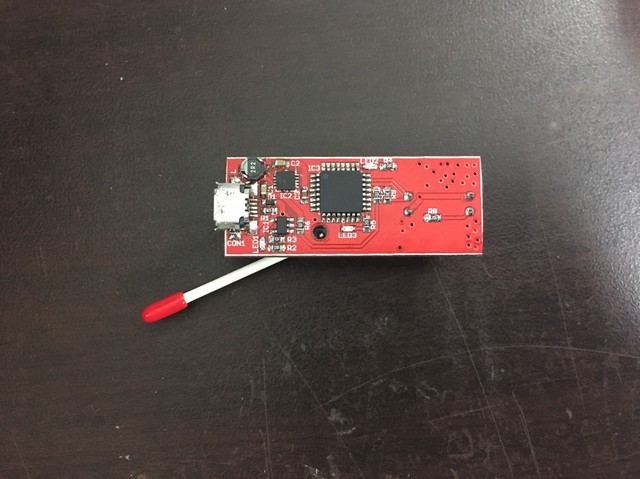 高度計です。超音波センサを用いて高度を取得しています。表面実装版を製作したところ、ロガーとの通信がうまくいかず苦戦しているようです。
高度計です。超音波センサを用いて高度を取得しています。表面実装版を製作したところ、ロガーとの通信がうまくいかず苦戦しているようです。

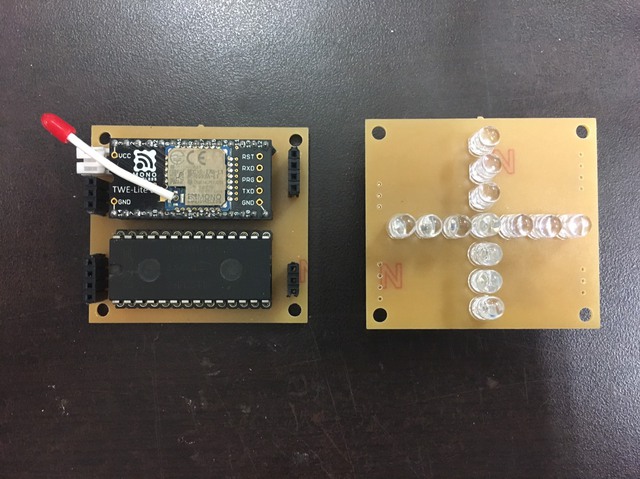
 舵角表示機です。サーボの切れ角とトリムの段階を表示します。これも昨年度のものより小型になっています。
舵角表示機です。サーボの切れ角とトリムの段階を表示します。これも昨年度のものより小型になっています。
 鳥コン本番まで残り4ヶ月弱しかありませんが、すべての製作物を完成させられるよう引き続き班員一同頑張っていきます。
鳥コン本番まで残り4ヶ月弱しかありませんが、すべての製作物を完成させられるよう引き続き班員一同頑張っていきます。
続いては電装系の進捗報告をしていきます!
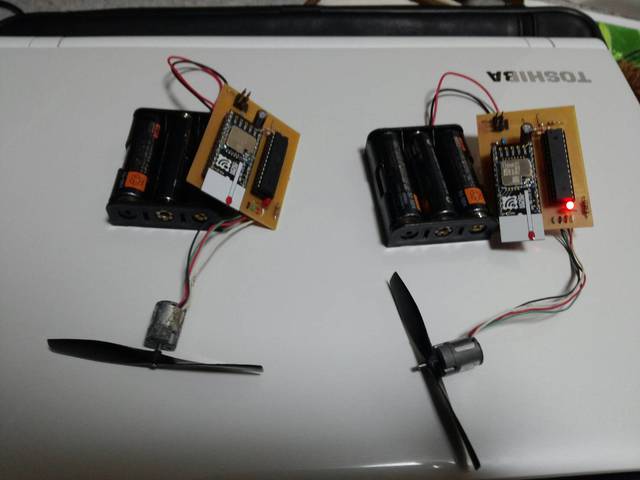
気速計です。ロータリーエンコーダの先端にプロペラを取り付け、回転速度に応じて対気速度を算出しています。今後は表面実装で小型化に挑戦していきます。
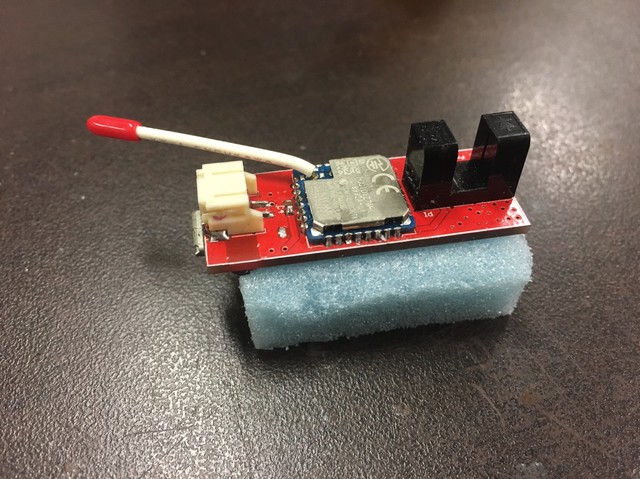
回転計です。ドライブシャフトにスリットを取り付け回転数の検出を行っています。昨年度のものより若干小型になりました(基板サイズ43.3×16.9 mm)。
出力計です。昨年までも行っていたクランクのひずみを基にしたトルクの取得に加え、今年は新たな試みとして9軸センサを用いた角速度の取得にも挑戦しています!さらに両面基板で作成することで、サイズは去年度のものの1/2以下となりました(37.8×22.2 mm)。
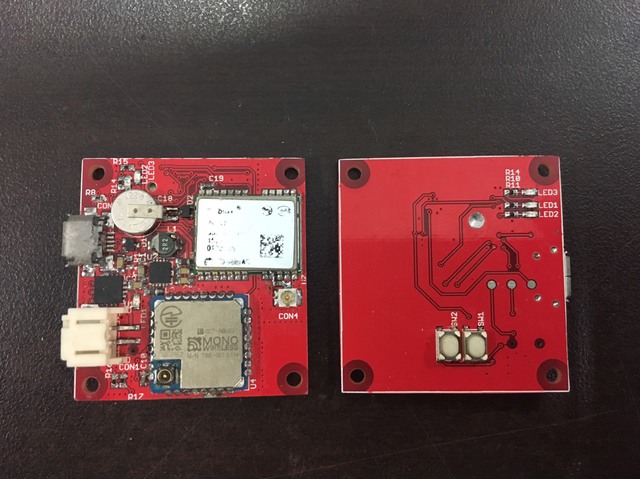
操舵の制御基板です。操縦桿の入力に応じて、尾翼のサーボモータの切れ角を変化させています。舵角表示機との通信を無線化することで、若干ですが小型化しています。
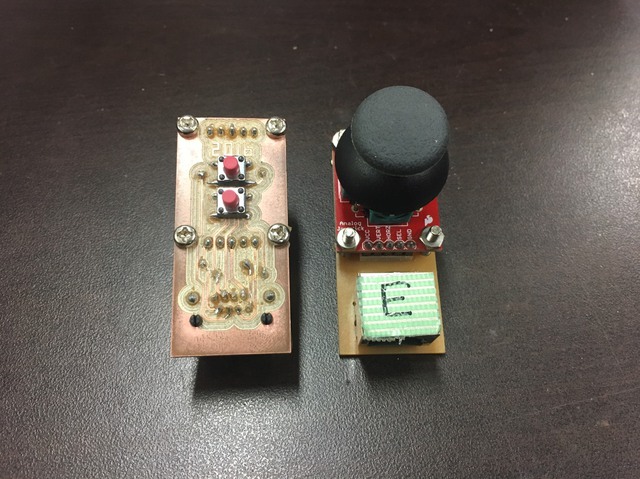
操縦桿です。ご賢察の通り、去年のものを使いまわしていました。しかし、前回のGSUにてハンドルに収まらないトラブルが発生したので作り直すことになりそうです。
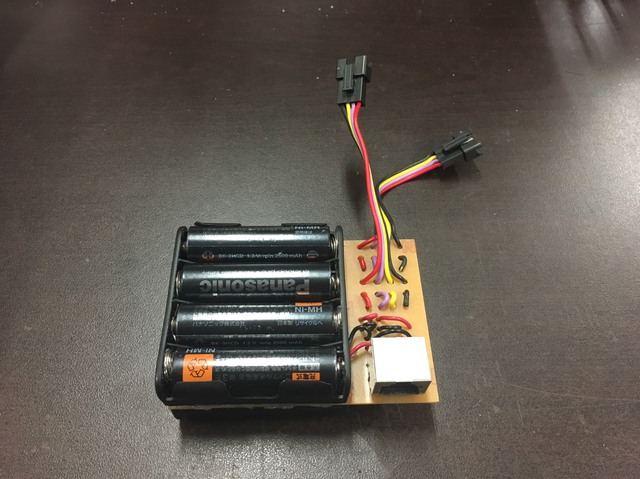
サーボ用電源です。軽量化のため、リチウムイオンポリマー電池への移行を検討しています。
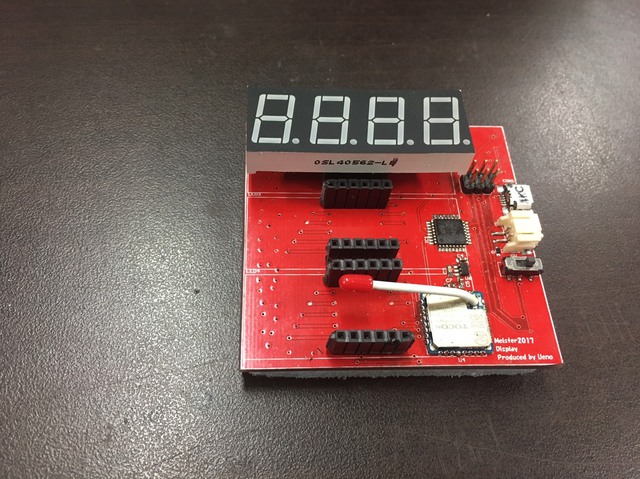
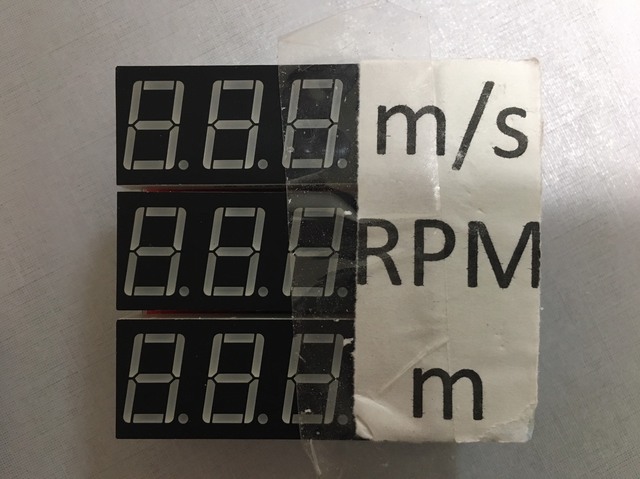
7セグ表示機です。気速、回転数、高度を表示します。昨年度のものよりひと回り小型化してます(基板サイズ68.2×64.6 mm)。
この流れでAndroid表示機も紹介したいところですが、残念ながらまだ完成していません...というかこれから作り始めるってレベルです...。
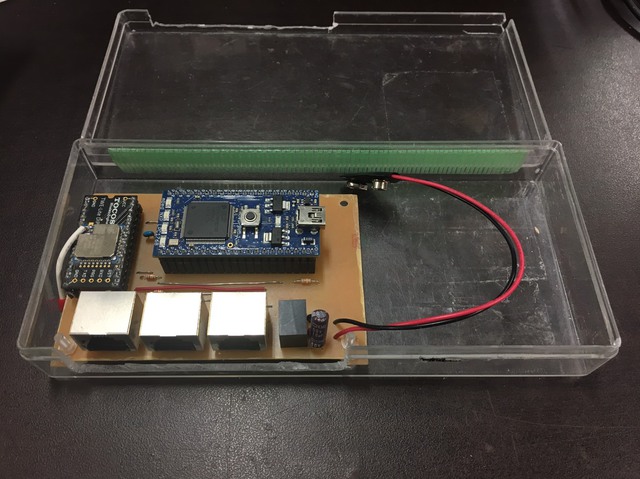
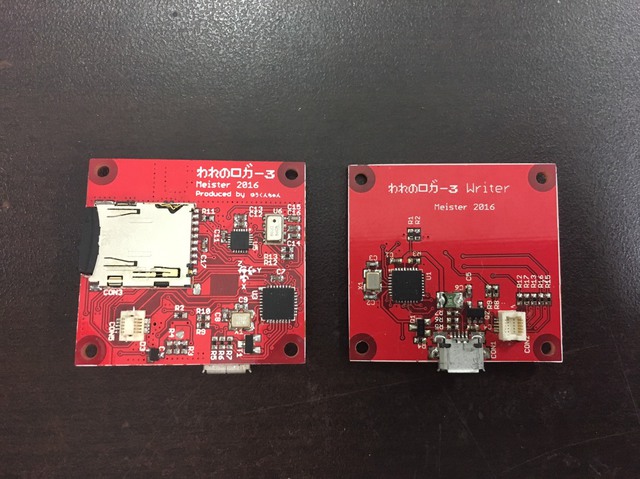
最後はロガーの紹介です。基板はまだ去年のものを使いまわしています。microSDへの書き込みの他に、GPSによる位置情報、9軸センサによる姿勢角、そして気圧の取得も行っています。Android表示機が完成し次第、基板の設計に入る予定です。
P.S. 先日行われたGSUのログに関しては、電操班の公式Twitter(@Meister_ctrl)にて公開いたします。ぜひご覧ください。