Home
レポート
電装・操縦班日記
2014年4月27日の記事
R.Yamada
が2014年4月27日に書いた記事です。
425~26 2ndTF 電装系ログ
書いた人:
R.Yamada
|
14/04/27 12:10
|
コメント(0)
操舵担当です。2ndTFお疲れ様でした。
4/25~26の2ndTFの電装系ログを掲載します。
電装系の総括
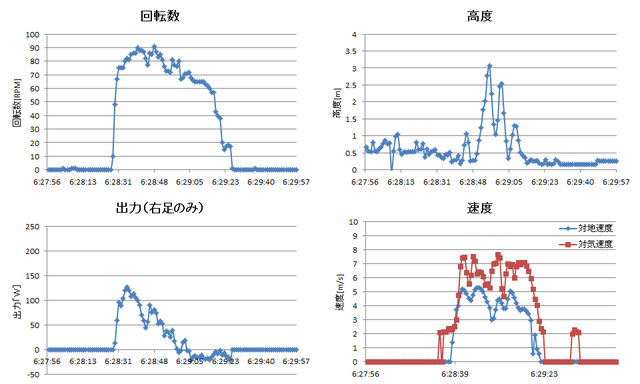
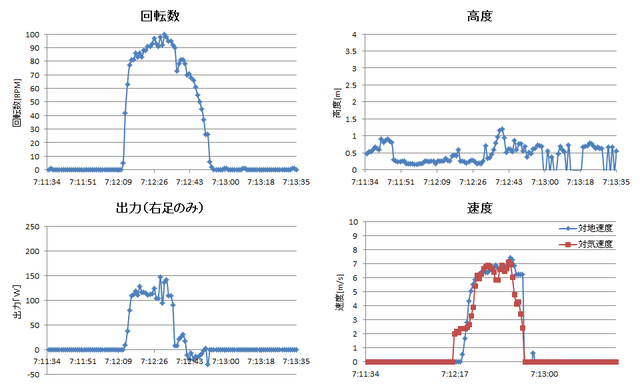
・回転計
ちゃんと仕事してる。
遮光のための覆いが欲しい。
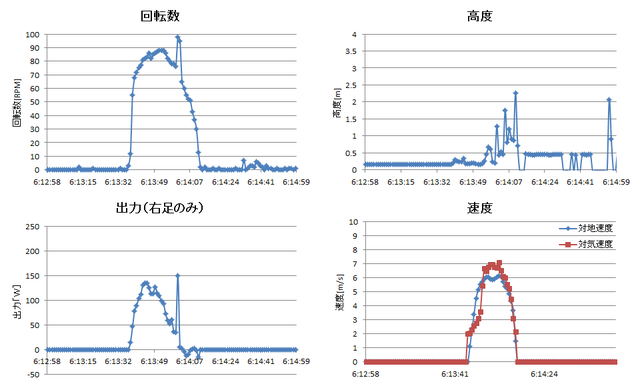
・高度計
今回初めて機体が浮いたので予想通りいくつか問題点を発見。
具体的には、
・測定値をTF動画を比較して妥当性を検証すべき。
・機体の振動によりセンサの方向がずれるため舟に固定が必要。
・測定値の振動が大きいためLPFが欲しい。
・草地に侵入した際センサ部分に土や草がついてしまっていた。
といった感じ。
1つ目~3つ目はすぐ出来る。
4つ目は、超音波式にて測定を行っているためセンサ表面を覆うことが出来ず、対策が難しいが、
そもそも草地に突っ込むことはレアケースだろうからあまり気にしなくてもよいか。
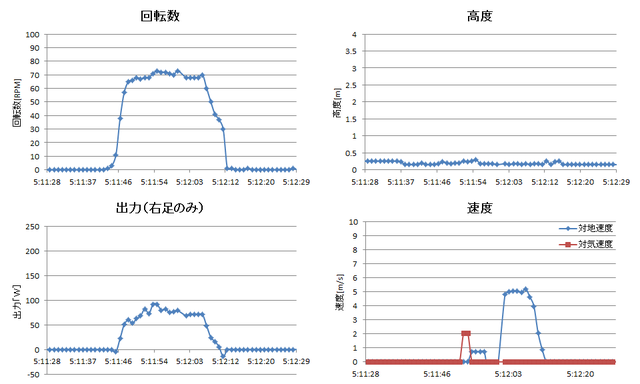
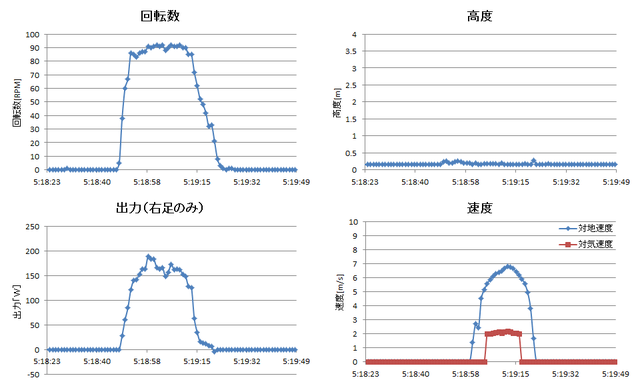
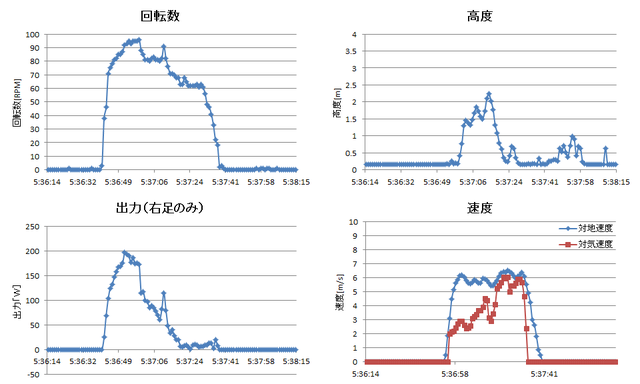
・気速計
序盤の対気速度が低い時には機能していない。
短距離など対気速度が高い時には割とまともな値を出しているように見える。
GPSから得た対地速度と、計測係が測定した風向風速から対地速度を求めて、妥当性の検証をすべき。
超音波式の開発が順調そうなのでそちらに乗り換えるのもありか。
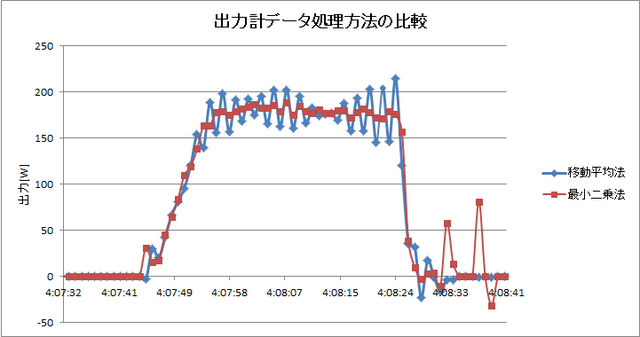
・出力計
大分いい感じになっきたように見える。
データ処理の方法を色々と検討中。
パイロットの脚がクランクにかける負荷は、クランクを押す時に大きくなり、戻す時に小さくなる。
これにより出力計の生データは、90RPMならf=1.5[Hz]の正弦波のような形状になる。
測定したいのはその正弦波の平均値なので、これまではこれを移動平均という方法で平滑化していたが、
今回は最小二乗法による三角関数 y=Asin(wt+φ)+B への近似を行った結果、測定値の振動をより抑制することが出来た。
次のグラフに移動平均法と最小二乗法の比較結果を示します。
またアスペクト比の高い人も言っていたように右脚と左脚の測定結果の和を取ると更に結果が平滑化されることが予想される。
それ以外にもデジタルフィルタによる処理も検討すべきか。
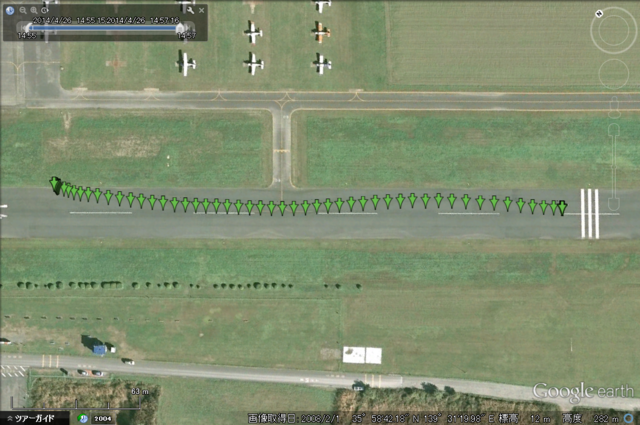
・GPS
1本目転がしの位置データが途中で途切れていたが、それ以外ではちゃんと仕事している。
GPSモジュールの設置場所は前田桁のよりも前にすべきか。
<回転試験:60回転30秒・90回転30秒>
<1本目:転がし>
(GPSログは途中で途切れていたため掲載無)
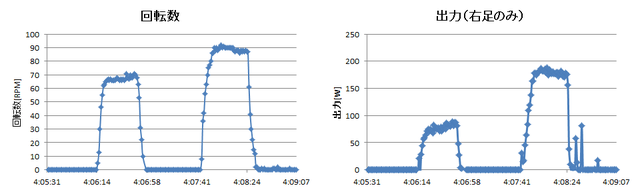
<2本目:滑走>
<3本目:ジャンプ>
<4本目:ジャンプ>
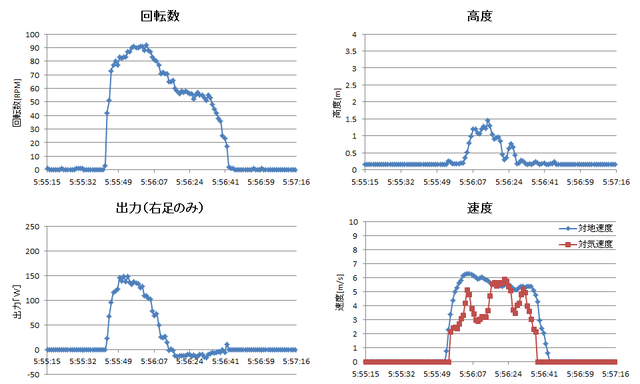
<5本目:短距離>
<6本目:短距離>
<7本目:短距離>
草地に突っ込みまくっててGPSの解析するのが恐ろしいですね・・・
GoogleEarth用のGPS軌跡データです。
GoogleEarthにインポートすると機体が動く軌跡が動く様子を見ることができます。
インストールの方法は
前回の記事
を見て下さい。
140425_2ndTF_②滑走_GPSログ.kml
140425_2ndTF_③ジャンプ_GPSログ.kml
140425_2ndTF_④ジャンプ_GPSログ.kml
140425_2ndTF_⑤短距離_GPSログ.kml
140425_2ndTF_⑥短距離_GPSログ.kml
140425_2ndTF_⑦短距離_GPSログ.kml
以上です。
コメント(0)
この記事へのコメントはありません
コメントを書く
お名前
メール
コメント
Copyright © 1992-2010 Meister. All rights reserved. E-mail :
webmaster@meister.ne.jp






コメント(0)
この記事へのコメントはありません
コメントを書く