2014年4月の記事です。
≪2014年2月 2014年5月≫
書いた人: R.Yamada | 14/04/27 12:10
コメントを書く
書いた人: R.Yamada | 14/04/21 00:24
書いた人: R.Yamada | 14/04/19 14:49
書いた人: R.Yamada | 14/04/17 17:08
コメントを全て読む / 書く
書いた人: R.Yamada | 14/04/13 02:53
書いた人: R.Yamada | 14/04/09 22:08
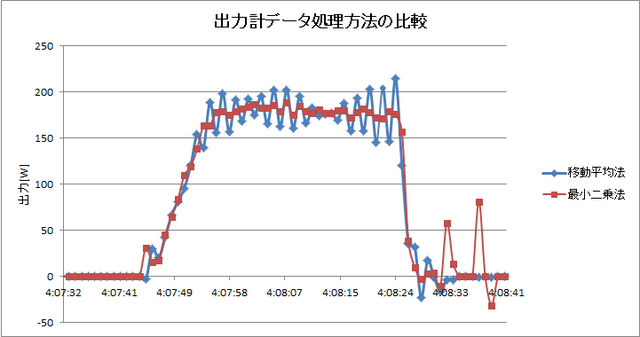
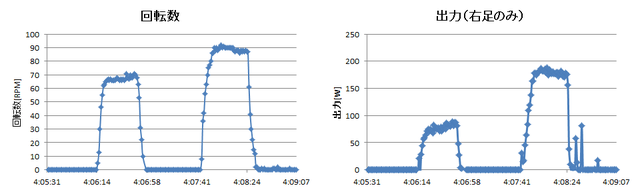


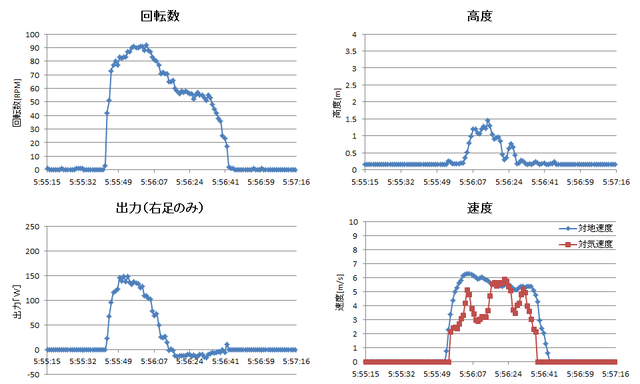






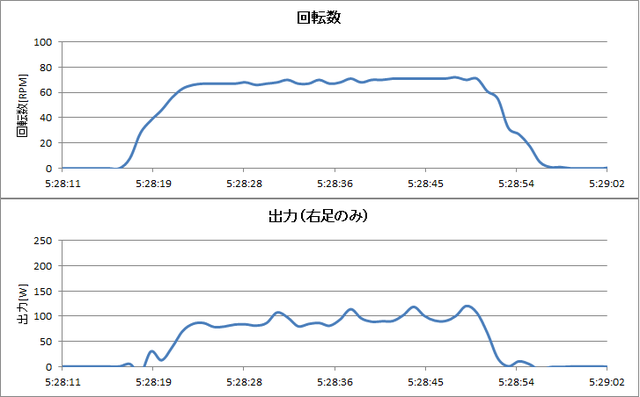
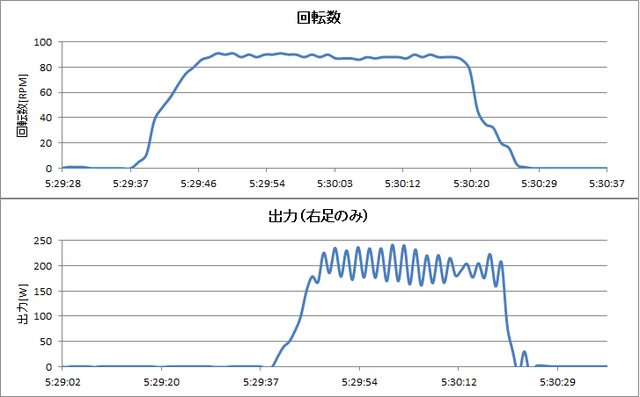
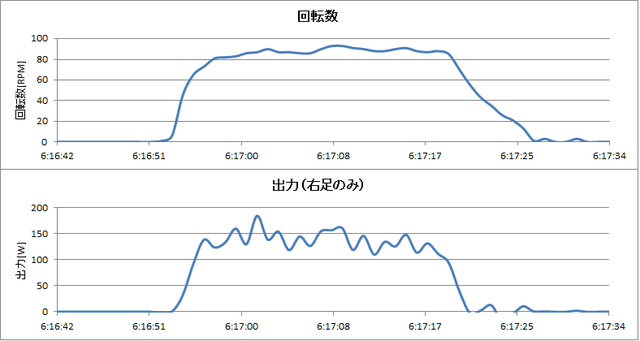
_回転数&出力グラフ-thumb-640x200-2373.png)
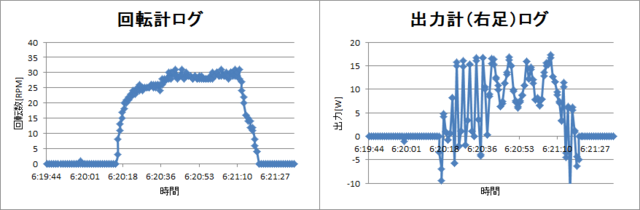
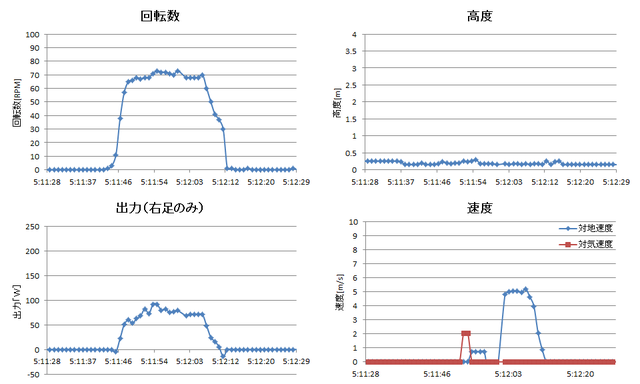
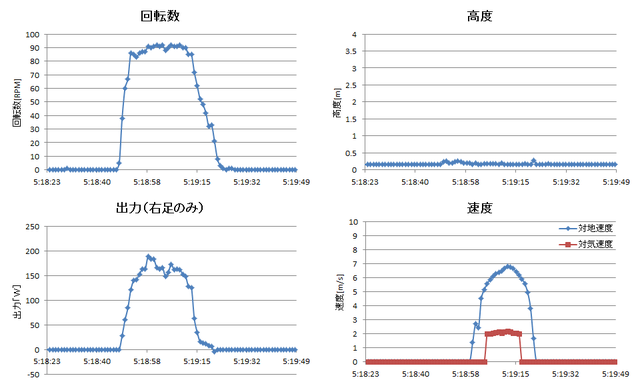
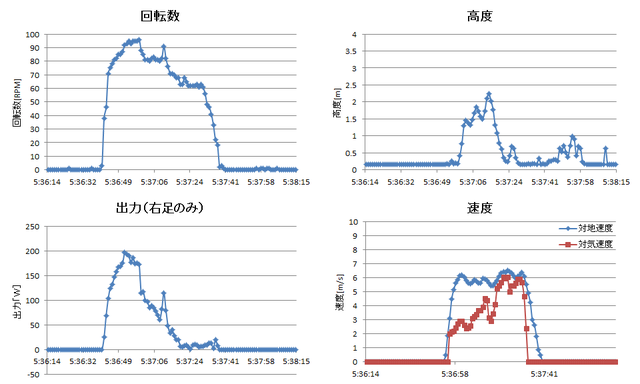
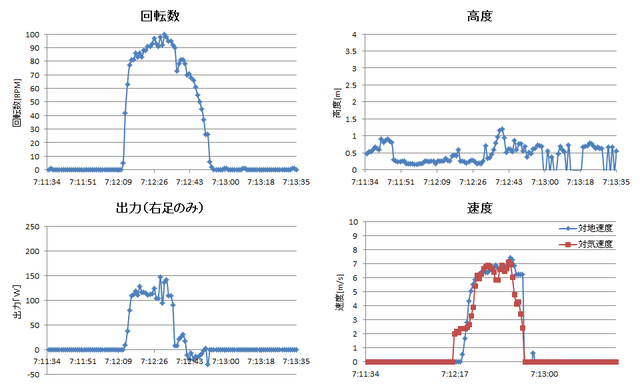
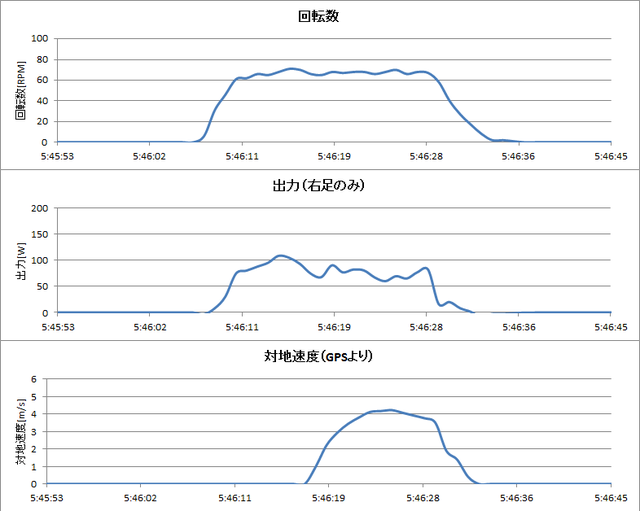
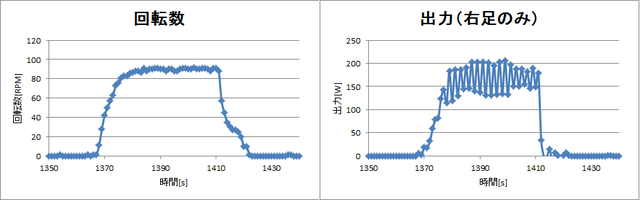
回転計・出力計ログのグラフ-thumb-640x356-2358.png)